|
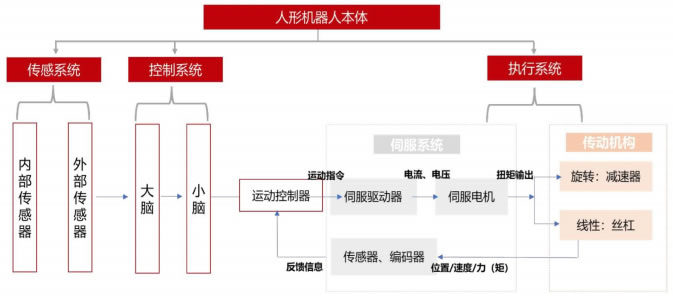
Å─┐é¾wüĒšf��Ż¼╚╦ą╬ÖCŲ„╚╦ė╔é„ĖąŽĄĮy��Īó┐žųŲŽĄĮy║═ł╠ąąŽĄĮy╚²┤¾ŽĄĮyśŗ│╔Ż║
é„ĖąŽĄĮy��ĪŻé„ĖąŽĄĮy╩Ūė╔ę╗ŽĄ┴ąé„ĖąŲ„śŗ│╔Ż¼ī”æ¬ė┌╚╦¾wĄ─
Ī░╬Õ╣┘Ī▒�Ż¼Ä═ų·½@╚Ī╚╦ą╬ÖCŲ„╚╦ā╚═Ō▓┐Ą─ĀŅæBą┼Žó����ĪŻ╚╦ą╬ÖCŲ„╚╦╩╣ė├
Ą─é„ĖąŲ„░³└©ā╚▓┐é„ĖąŲ„║══Ō▓┐é„ĖąŲ„����Ż¼ā╚▓┐é„ĖąŲ„ų„ę¬░³└©╬╗ų├é„
ĖąŲ„��Īó╦┘Č╚é„ĖąŲ„�ĪóæTąįé„ĖąŲ„Ą╚����Ż¼ė├üĒÖz£yĪó╠ß╣®▒Š¾wĀŅæBą┼Žó�Ż¼
╚ńĖ„ĻP╣ØĄ─╬╗ų├��Īó╦┘Č╚Īó╝ė╦┘Č╚Ą╚Ż¼Å─Č°×ķ▀\äė┐žųŲ╠ß╣®ą┼Žóų¦ō╬����Ż╗
═Ō▓┐é„ĖąŲ„ų„ę¬ėąęĢėXé„ĖąŲ„���Īóė|ėXé„ĖąŲ„Ą╚�����Ż¼ė├üĒĖąų¬ÖCŲ„╚╦╦∙╠Ä
Ą─╣żū„ŁhŠ│╗“╣żū„ĀŅørą┼ŽóŻ¼╩╣ÖCŲ„╚╦Ą─äėū„▀mæ¬═ŌĮńŪķørĄ─ūā╗»Ż¼
▀_ĄĮĖ³Gīė┤╬Ą─ūįäė╗»�����ĪŻ
┐žųŲŽĄĮy���ĪŻŽÓ«öė┌ÖCŲ„╚╦Ą─Ī░┤¾─XĪ▒║═Ī░ąĪ─XĪ▒�����Ż¼╩ŪÖCŲ„╚╦
Ą─ųĖō]ųąśą��ĪŻĪ░┤¾─XĪ▒žōž¤ŁhŠ│Ėąų¬Īóąą×ķ┐žųŲ��Īó╚╦ÖCĮ╗╗ź��Ż¼═©▀^╔Ņ
Č╚īW┴Ģ║═ AI ╝╝ągŻ¼▓ó│õĘų└¹ė├┤¾─Żą═�����Ż¼īŹ¼Fūįų„īW┴Ģ���ĪóšJų¬║═ųŪ─▄
øQ▓▀��Ī�����ŻĪ░ąĪ─XĪ▒ätžōž¤▀\äė┐žųŲ░³└©▀\äėęÄäØĪóū╦æB┐žųŲ��ĪóäėæBŲĮ║Ō
Ą╚�Ż¼═©▀^īŹĢrĖąų¬ÖCŲ„╚╦Ą─ĀŅæB║═ŁhŠ│ą┼ŽóŻ¼ąĪ─X┐╔ęįš{š¹ÖCŲ„╚╦Ą─äėū„����Ż¼╩╣Ųõ─▄ē“ĘĆČ©Ąžąąū▀��Īó┼▄▓ĮĪó╠°▄SĄ╚����Ī�����Ż┐žųŲŽĄĮyžōž¤╠Ä└Ēū„śI
ųĖ┴Ņą┼Žó���Īóā╚═ŌŁhŠ│ą┼Žó�Ż¼▓óę└ō■ŅAČ©Ą─▒Š¾w─Żą═�����ĪóŁhŠ│─Żą═║═┐žųŲ
│╠ą“ū÷│÷øQ▓▀Ż¼«a╔·ŽÓæ¬Ą─┐žųŲą┼╠¢���Ż¼═©▀^“īäėŲ„“īäėł╠ąąÖCśŗĄ─Ė„
éĆĻP╣Ø░┤╦∙ąĶĄ─Ēśą“Īó┤_Č©Ą─▄ē█E▀\äė�����Ż¼═Ļ│╔╠žČ©Ą─ū„śI���ĪŻ
ł╠ąąŽĄĮy�ĪŻī”æ¬╚╦¾wĄ─▄|Ė╔║═╦─ų½Ż¼žōž¤ł╠ąą┐žųŲŽĄĮyųŲČ©Ą─▓┘ū„����Ż¼ų„ę¬ė╔╦┼Ę■ŽĄĮy║═ł╠ąąÖCśŗĮM│╔�Ī�ŻĪ░ÖCŲ„ų½Ī▒ųĖĘ┬╚╦ÖCąĄ▒█Īó
ņ`Ū╔╩ų��Īó═╚ūŃĄ╚�Ż¼Ī░ÖCŲ„¾wĪ▒ųĖ╣Ū„└Īó▒Š¾wĮYśŗĄ╚�����ĪŻ╦┼Ę■ŽĄĮy╩Ū─▄Ė∙
ō■ųĖ┴Ņą┼╠¢£╩┤_Ąž┐žųŲł╠ąą▓┐╝■Ą─▀\äė╦┘Č╚┼c╬╗ų├Ą─“īäėŽĄĮy�����Ż¼ę╗░Ń
╦┼Ę■ŽĄĮyė╔║╦ą─┴Ń▓┐╝■ļŖÖC�����Īó“īäėŲ„║═é„ĖąŲ„/ŠÄ┤aŲ„ĮM│╔�Ż╗é„äėÖC
śŗ╩Ū░čäė┴”Å─ÖCŲ„Ą─ę╗▓┐Ęųé„▀fĄĮ┴Ēę╗▓┐ĘųŻ¼Ąõą═ÖCśŗėą£p╦┘Ų„�����ĪóĮz
Ė▄���Īó╬ü▌å╬üŚUé„äėŚUĄ╚��ĪŻ
|
