|
╣╚ĖĶ DeepMind į┌╣┘ŠW░l▓╝┴╦┤¾═©ė├┤¾─Żą═ų«ę╗ RT-XŻ¼▓óķ_Ę┼┴╦ė¢ŠÜöĄō■╝»
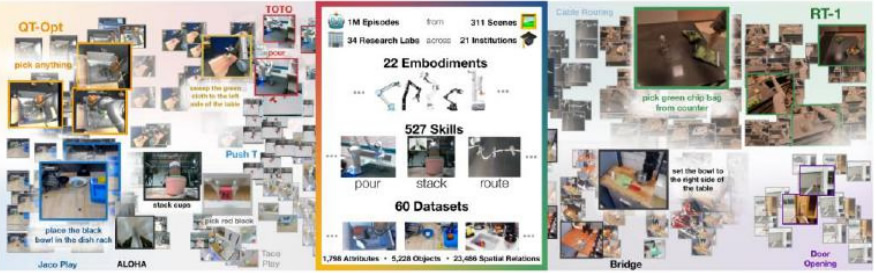
Open X-EmbodimentĪŻįōöĄō■╝»üĒūį 21 éĆ蹊┐ÖCśŗŻ¼░³║¼į┌ 22 ĘNŅÉą═Ą─ÖCŲ„╚╦╔Ž▓╔╝»Ą─│¼▀^ 15
╚féĆ╚╬䚥─╔Ž░┘╚fŚlöĄō■Ż¼š╣╩Š┴╦ 527 ĒŚ╝╝─▄ĪŻųTČÓ╚╦╣żųŪ─▄┐ŲīW╝ę▒Ē╩ŠŻ¼ÖCŲ„╚╦─Żą═Ą─
ImageNet Ģr┐╠ĄĮüĒ┴╦
▓╔ė├ Open X-Embodiment ė¢ŠÜĄ─ RT-Xąį─▄▒Ē¼F┤¾Ę∙╠ß╔²ĪŻDeepMindĘųäe╗∙ė┌ RT-1║═ RT-2Ż¼
▓╔ė├ Open X-Embodiment öĄō■╝»▀Mąąė¢ŠÜĄ├ĄĮ┴╦ RT-1-X ║═ RT-2-XŻ¼Ą├ęµė┌Ė³ČÓśė╗»Īó┐ńīŹ¾w
Ą─ė¢ŠÜöĄō■Ż¼ąį─▄▒Ē¼F▌^įŁėą─Żą═Š∙ėą┤¾Ę∙╠ß╔²ĪŻį┌ŽÓ═¼Ą──Żą═╝▄śŗŽ┬Ż¼╩╣ė├ Open X�Embodiment öĄō■╝»ė¢ŠÜĄ─ RT-1-X ŲĮŠ∙ąį─▄ā×ė┌įŁ╩╝─Żą═ 50%ĪŻRT-2-X ät┐╔ęįł╠ąąÅ─╬┤ė¢ŠÜĄ─
▓┘ū„Ż¼ė┐¼F─▄┴”▀_ĄĮ┴╦RT-2Ą─╚²▒ČŻ¼░³└©ī”┐šķgĄ─Ė³║├└ĒĮŌŻ¼äėū„Ą─╝Ü─ü│╠Č╚Ą╚ĪŻ└²╚ńŻ¼ūīÖCŲ„
╚╦░č╠O╣¹─├ĄĮ▓╝ĖĮĮ³Ż¼Č°▓╗╩Ū─├ĄĮ▓╝╔Ž├µŻ¼RT-2-X Č╝─▄║▄║├Ą─ģ^äe▀@ą®ųĖ┴ŅĄ─▓Ņ«ÉŻ¼▓óū÷│÷ŽÓæ¬
Ą─äėū„ĪŻ
DeepMind Ą─▀@ĒŚą┬蹊┐▒Ē├„Ż¼═©▀^└¹ė├Ė³ČÓśė╗»Ą─öĄō■║═Ė³║├Ą──Żą═▀MąąöUš╣īW┴ĢŻ¼ėą┐╔─▄ķ_
░l│÷Ė³ėąė├Ą─▌oų·ÖCŲ„╚╦ĪŻ╗∙ė┌┤¾┴┐ÖCŲ„╚╦öĄō■ė¢ŠÜĄ├ĄĮĄ─═©ė├┤¾─Żą═┐╔ęįį┌▓╗═¼ŁhŠ│Ž┬æ¬ė├Ż¼
¤ošō╩Ūį┌╣╚ĖĶ DeepMind Ą─ÖCŲ„╚╦╔ŽŻ¼▀Ć╩Ūį┌╩└ĮńĖ„Ąž▓╗═¼┤¾īWĄ─ÖCŲ„╚╦╔ŽŻ¼Ųõąį─▄Č╝Ą├ĄĮ┴╦’@ų°╠ßGĪŻ╬┤üĒĄ─┴Ēę╗éĆĘĮŽ“╩Ū▀Mę╗▓Į╠Į╦„▓╗═¼öĄō■╝»Ą─╗ņ║ŽĢ■╚ń║╬ė░Ēæ┐ńŠ▀╔ĒųŪ─▄¾wĘ║╗»Ż¼ęį╝░
▀@ĘNĘ║╗»╩Ū╚ń║╬╩ŪīŹ¼FĄ─ĪŻ
|
