|
╣╚ĖĶ DeepMind ═Ų│÷ ┴╦ RT-2Ż¼▀@╩ŪDę╗éĆ┐žųŲÖCŲ„╚╦Ą─ęĢėX-šZčį-äėū„
Ż©Vision-Language-ActionŻ¼VLAŻ®─Żą═ĪŻ═©▀^īó VLM ŅAė¢ŠÜ┼cÖCŲ„╚╦öĄō■ŽÓĮY║ŽŻ¼─▄ē“Č╦ĄĮČ╦ų▒Įė▌ö│÷ÖCŲ„╚╦Ą─┐žųŲĪŻ
RT-2 ęį VLM ×ķ╗∙ĄAŻ¼╔²J│╔×ķ╚½ą┬Ą─ęĢ-šZčį-äėū„Ż©VLAŻ®─Żą═ĪŻRT-2 īóę╗éĆ╗“ČÓéĆłDŽ±ū„×ķ
▌ö╚ļŻ¼▓ó╔·│╔ę╗ŽĄ┴ą═©│Ż┤·▒Ēūį╚╗šZčį╬─▒ŠĄ─ś╦ūóĪŻ└²╚ńRT-2īóįŁ▒ŠĘŪ│ŻŠ▀¾wĄ─ÖCŲ„╚╦äėū„öĄō■
▐Dūā│╔╬─▒Š tokenŻ¼└²╚ńīó▐DäėČ╚öĄĪóū°ś╦³cĄ╚öĄō■Ż¼▐Dūā│╔╬─▒ŠĪ░Ę┼ĄĮ─│éĆ╬╗ų├Ī▒ĪŻ▀@śėę╗üĒŻ¼
ÖCŲ„╚╦öĄō■ę▓─▄▒╗ė├ĄĮęĢėX-šZčįöĄō■╝»ųą▀Mąąė¢ŠÜŻ¼═¼Ģrį┌▀Mąą═Ų└ĒĄ─▀^│╠ųąŻ¼įŁ▒ŠĄ─╬─▒ŠųĖ┴Ņ
ę▓Ģ■▒╗ųžą┬▐D╗»×ķÖCŲ„╚╦öĄō■Ż¼īŹ¼F┐žųŲÖCŲ„╚╦Ą╚ę╗ŽĄ┴ą▓┘ū„Ż║×ķ┴╦┐žųŲÖCŲ„╚╦Ż¼čąŠ┐╚╦åT═©▀^
īó▓┘ū„▒Ē╩Š×ķ─Żą═▌ö│÷ųąĄ─ś╦ūóŻ¼▓óīó▓┘ū„├Ķ╩÷×ķ┐╔ęįė╔ś╦£╩ūį╚╗šZčįś╦ūó╔·│╔Ų„╠Ä└ĒĄ─ūųĘ¹┤«Ż¼
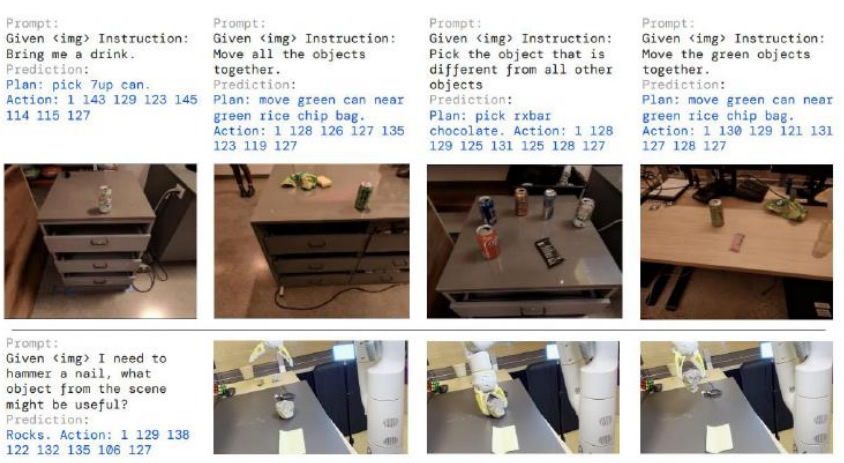
▀@ĘNūųĘ¹┤«Ą─╩Š└²┐╔ęį╩ŪÖCŲ„╚╦äėū„ś╦ėøŠÄ╠¢Ą─ą“┴ąŻ¼└²╚ńĪ░1 128 91 241 5 101 127 217Ī▒ĪŻįō
ūųĘ¹┤«ęįę╗éĆś╦ųŠķ_╩╝Ż¼įōś╦ųŠųĖ╩ŠÖCŲ„╚╦╩Ū└^└m▀Ć╩ŪĮKų╣«öŪ░Ūķ╣ØŻ¼╚╗║¾ÖCŲ„╚╦Ė∙ō■ųĖ╩ŠĖ─ūā─®Č╦ł╠ąąŲ„Ą─╬╗ų├║═ą²▐Dęį╝░ÖCŲ„╚╦ūź╩ųĄ╚├³┴ŅĪŻė╔ė┌äėū„▒╗▒Ē╩Š×ķ╬─▒ŠūųĘ¹┤«Ż¼ę“┤╦ÖCŲ„╚╦ł╠ąąäėū„├³┴ŅŠ═Ž±ł╠ąąūųĘ¹┤«├³┴Ņę╗śė║åå╬ĪŻėą┴╦▀@ĘN▒Ē╩ŠŻ¼Š═┐╔ęįų▒Įėī”¼FėąĄ─ęĢėX-šZčįŻ©VLMŻ®
─Żą═▀Mąą╬óš{Ż¼▓óīóŲõ▐DōQ×ķęĢėX-šZčį-äėū„Ż©VLAŻ®─Żą═ĪŻ
RT-2 ▌^╗∙ŠĆ─Żą═ RT-1 Ą╚Č°čįŠ▀ėąĖ³ÅŖĄ─╚╬äš╠Ä└Ē─▄┴”║═Ę║╗»─▄┴”ĪŻ╣╚ĖĶį┌╚ź─Ļ═Ų│÷┴╦ RT-1 ÖC
Ų„╚╦─Żą═Ż¼RT-2Ą─ė¢ŠÜätčė└m╩╣ė├┴╦ RT-1 Ą─č▌╩ŠöĄō■Ż¼ė╔ 13 éĆÖCŲ„╚╦į┌▐k╣½╩ęĪóÅNĘ┐ŁhŠ│ųąŻ¼
ÜvĢr 17 éĆį┬▀Mąą╩š╝»ĪŻRT-2Ą─╗∙ĄA VLMät▀xė├┴╦▓╗Š├Ū░═Ų│÷Ą─ PaLM-E║═Ė³įńę╗ą®Ą─ PaLI-XŻ¼
═©▀^£yįć║¾░l¼FŻ¼RT-2 ┼cų«Ū░Ą──Żą═ŽÓ▒╚Ż¼Š▀ėąĖ³GĄ─╚╬äš│╔╣”┬╩Ż©Ę¹╠¢└ĒĮŌĪó═Ų└Ē║═╚╦ŅÉūRäe
╚²éĆĘĮ├µŻ®ęį╝░Ė³ÅŖĄ─Ę║╗»║═ė┐¼F─▄┴”Ż©į┌ÖCŲ„╚╦├µī”ęįŪ░╬┤ęŖ▀^ł÷Š░ųąĄ─ąį─▄ĘĮ├µŻ¼RT-2 Å─
RT-1 Ą─ 32% ╠ßGĄĮ 62%Ż®ĪŻ
RT-2 Š▀ėąīW┴ĢķLŲ┌ęÄäØ║═║åęū╝╝─▄Ą──▄┴”ĪŻčąŠ┐╚╦åTīó╦╝ŠSµ£─▄┴”╝ė╚ļĄĮ┴╦ÖCŲ„╚╦┐žųŲųąŻ¼═©▀^
ī”öĄō■▀Mąąį÷ÅŖŻ¼╠Ē╝ė┴╦ę╗éĆŅ~═ŌĄ─Ī░ėŗäØĪ▒▓Į¾EŻ¼įō▓Į¾Eė├ūį╚╗šZčį├Ķ╩÷ÖCŲ„╚╦╝┤īó▓╔╚ĪĄ─äė
ū„Ą──┐Ą─Ż¼╚╗║¾╩Ūäėū„Ą─├Ķ╩÷║═ś╦ūóĪŻ└²╚ńĪ░ųĖ┴ŅŻ║╬ęI┴╦ĪŻėŗäØŻ║╠¶▀x Rxbar Ū╔┐╦┴”ĪŻąąäėŻ║
1 128 124 136 121 158 111 255Ī▒ĪŻ═©▀^▀@ę╗▀^│╠Ż¼RT-2 Š═┐╔ęįŽ╚ė├ūį╚╗šZčįęÄäØūį╝║Ą─ąąäėŻ¼
Å─Č°┐╔ęįł╠ąąĖ³ČÓÅ═ļsĄ─├³┴ŅĪŻ
|
